
Ev / Haberler / Sektör haberleri / AGV Sistemlerinde Hangi Motorlar Kullanılır ve Doğru AGV Tahrik Motorunu Nasıl Seçersiniz?

 dil
dil
Uygulama endüstrisi
AGV
Otomatik Robotlar

lazer kesimi

Lojistik sıralama

Fotovoltaik güç istasyonu

Tıbbi cihazlar
AGV Sistemlerinde Hangi Motorlar Kullanılır ve Doğru AGV Tahrik Motorunu Nasıl Seçersiniz?
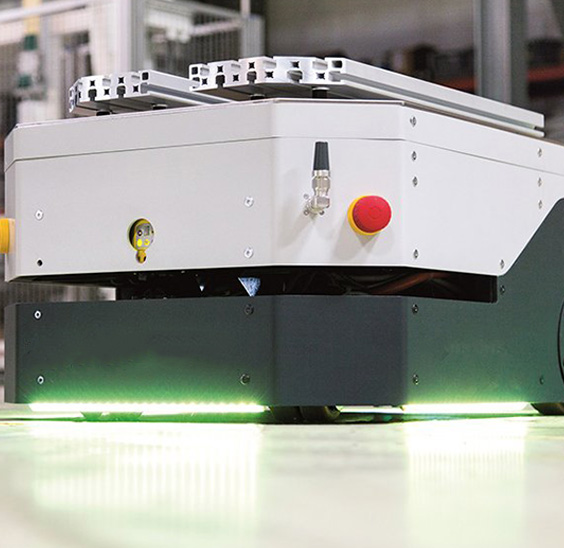
Tahrik motoru, Otonom Güdümlü Araçtaki (AGV) en kritik elektromekanik bileşendir. AGV'nin nasıl hızlanacağını, kendisini ne kadar hassas bir şekilde konumlandıracağını, ne kadar yük taşıyabileceğini, aküsünün şarjlar arasında ne kadar dayanacağını ve tahrik sistemi bakım gerektirmeden aracın ne kadar süre çalışacağını belirler. Yetersiz güce sahip veya yanlış belirlenmiş bir tahrik motoruna sahip bir AGV, üretimdeki yük ve hız gereksinimlerini karşılayamaz; zayıf motor verimliliğine sahip bir motor, aküyü lojistik operasyonun kaldırabileceğinden daha hızlı tüketir; Sık bakım gerektiren bir tahrik motoruna sahip olan bu sistem, tüm değer teklifi güvenilir, sürekli otonom çalışma olan bir sistemde plansız kesintilere neden olur.
AGV sistem entegratörleri, tahrik bileşenlerini belirleyen robot mühendisleri, AGV platformlarını değerlendiren depo otomasyon ekipleri ve yeni AGV araçları tasarlayan OEM ekipman geliştiricileri için, AGV tahrik sistemlerinde kullanılan motor teknolojilerini ve hangi teknolojinin hangi uygulamaya uygun olduğunu belirleyen spesifikasyon parametrelerini anlamak, doğru bileşen kararlarını vermek için temel bilgidir. Bu kılavuz AGV sürücü motoru tiplerini, seçim parametrelerini ve AGV motor uygulamalarını genel endüstriyel motor uygulamalarından ayıran özel gereksinimleri kapsar.
AGV Tahrik Motoru Gereksinimleri Genel Endüstriyel Motor Gereksinimlerinden Neden Farklıdır?
AGV tahrik motorları, onları çoğu genel endüstriyel motor uygulamasından ayıran zorlu ve farklı koşullar altında çalışır:
Pil güç kaynağı. Tüm AGV'ler pille çalışır; AC şebeke gücüne bağlanmadan bir DC pil paketiyle (tipik olarak 24V, 36V veya 48V nominal) çalışırlar. Bunun için temel olarak DC uyumlu tahrik motorları gerekir. AC motorlar yerleşik invertörlerle birlikte kullanılabilir, ancak pille çalışan bir sistemde DC'den AC'ye dönüşümün verimlilik kaybı önemlidir. DC motorlar - ve özellikle BLDC motorlar - baskın seçimdir çünkü pil gücünü doğrudan (veya bir DC-DC dönüştürücü aracılığıyla) ters çevirme cezası olmadan kabul ederler.
Sık başlatma-durdurma döngüleri. AGV'ler dinlenmeden seyahat hızına doğru hızlanır, bir toplama veya bırakma noktasına gider ve günde yüzlerce veya binlerce kez tekrar tekrar durur. Tahrik motorunun bu başlatma-durdurma döngüsünü aşırı ısınmadan veya aşırı aşınmadan gerçekleştirmesi gerekir; bu da motorun termal yönetimine ve fırçalı motorlar için yüksek akım başlatma geçişlerini idare eden komütatör ve fırça tertibatına talep getirir.
Çift yönlü çalışma. AGV'ler hem ileri hem de geri gitmeli ve yönler arasında mekanik şok olmadan temiz bir şekilde geçiş yapmalıdır. Motor ve kontrol cihazının düzgün çift yönlü hız kontrolünü desteklemesi gerekir. Yönlendirme diferansiyelli AGV'ler için (solda ve sağda bağımsız tekerlek hızı kontrolünün dönüşü oluşturduğu), doğru yönlendirme için iki tahrik motorunun hız-tork tepkisi açısından tam olarak eşleştirilmesi gerekir.
Hassas hız ve konum kontrolü. Modern AGV'lerde (özellikle lazer güdümlü (LiDAR), görüş güdümlü veya manyetik izli AGV'lerde) navigasyon doğruluğu, hassas hız kontrolü ve bazı sistemlerde tahrik motoru kodlayıcısından hassas konum geri bildirimi gerektirir. Motor, hız avcılığı veya dengesizlik olmaksızın, yük ve arazi aralığı boyunca tutarlı, kontrollü hızlarda çalışmalıdır.
Pil ömrü için yüksek verimlilik. Pille çalışan otonom bir araçta motor verimliliği, şarjlar arasındaki çalışma süresini doğrudan belirler. %75 yerine %85 verimle çalışan bir tahrik motoru sistemi, aracın çalışma aralığını yaklaşık %13 oranında genişletir; bu, bir lojistik uygulamasında, bir aracın bir akü döngüsü içerisinde rotasını tamamlaması ile planlanmamış bir şarj duruşu gerektirmesi arasındaki fark olabilir. Enerji verimliliği, AGV motor seçiminde ikincil bir husus değil, birinci sınıf bir spesifikasyon gerekliliğidir.
AGV Tahrik Sistemlerinde Kullanılan Ana Motor Tipleri
Fırçasız DC Dişli Motorları (BLDC): Baskın AGV Tahrik Teknolojisi
Fırçasız DC dişli motorlar, modern AGV sistemleri için ezici bir çoğunlukla tercih edilen tahrik motoru teknolojisidir. BLDC motor, geleneksel bir fırçalı DC motorun mekanik komütatör ve fırça düzeneğinin yerini elektronik komütasyonla alır - bir motor kontrolörü, rotor konumunu okur (Hall etkisi sensörleri veya kodlayıcı geri bildirimi yoluyla) ve herhangi bir fiziksel fırça teması olmadan dönüşü korumak için stator sargılarını doğru sırayla değiştirir. Bu elektronik komutasyon, AGV bağlamında BLDC motorlara fırçalı motorlara göre belirleyici avantajlar sağlayan şeydir:
Fırça aşınması yok = fırça bakımı yok. Fırçalı bir DC motorda, komütatör halkalarına baskı yapan karbon fırçalar çalışma sırasında sürekli olarak aşınır. Yüksek görev döngülerinde (üç vardiyalı lojistik operasyonlarında günde 20 saat çalışan AGV'ler), fırça değiştirme aralıklarına aylar içinde ulaşılabilir, bu da planlı aksama süresi ve değiştirme işçiliği gerektirir. BLDC motorların takacak fırçaları yoktur; Aşınmaya uğrayan tek bileşen, hizmet ömrü binlerce saatle ölçülen motor yataklarıdır. Sürekli çalışan bir AGV filosu için fırça bakımının ortadan kaldırılması, yüksek işletme maliyeti ve çalışma süresi avantajıdır.
Daha yüksek verimlilik. BLDC motorlar, nominal çalışma noktalarında tipik olarak %90-95 elektrik-mekanik verimliliğe ulaşırken, eşdeğer fırçalı DC motorlarda bu oran %75-85'tir. Pille çalışan bir AGV'de bu verimlilik farkı doğrudan şarj döngüsü başına daha fazla çalışma süresi anlamına gelir.
Daha iyi termal performans. BLDC motor ısısı öncelikle motor gövdesiyle doğrudan temas halinde olan stator sargılarında üretilir ve bu da ısı dağıtımını verimli hale getirir. Fırçalı motorlar hem sargılarda hem de komütatör/fırça temas noktasında ısı üretir ve fırça temas noktası, ısı dağıtımının daha az etkili olduğu motorun iç kısmındadır. BLDC motorlar aşırı ısınmadan daha yüksek sürekli görev döngülerini sürdürür.
Hassas hız kontrolü. Kodlayıcı veya Hall sensörü geri bildirimi ile elektronik komütasyon, geniş bir çalışma aralığında sıkı kapalı döngü hız kontrolü sağlar. AGV navigasyon algoritmaları, mutlak konum düzeltmeleri arasındaki ölü hesaplama konum tahmini için doğru tekerlek hızı geri bildirimine dayanır; kodlayıcı geri beslemeli BLDC motorlar bu doğruluğu güvenilir bir şekilde sağlar.
Fırçalı DC Dişli Motorları: Düşük Hizmet AGV Uygulamaları için Uygun Maliyetli
Fırçalı DC dişli motorlar, çalışma görev döngüsünün daha düşük olduğu (sürekli 7/24 çalışma olmadığı), yük taşıma gereksinimlerinin mütevazı olduğu ve maliyete duyarlı AGV platformlarında daha düşük motor maliyetinin öncelikli olduğu AGV uygulamalarında kullanılmaya devam etmektedir. Küçük parça taşıma, belge teslimi, hafif üretim hattı desteği gibi hafif hizmet içi lojistik için tasarlanan AGV'lerde, fırçalı DC motorların gerektirdiği daha basit kontrol elektroniği (komütasyon kontrolörüne gerek yoktur) ve bunların daha düşük birim maliyetleri, fırça bakım gerekliliğine rağmen BLDC alternatifleri yerine tercih edilmelerini haklı gösterebilir.
Fırçalı DC motorlar aynı zamanda çok yüksek başlatma torku da sağlar (bazı tasarımlarda eşdeğer boyuttaki BLDC motordan daha yüksektir), bu da eğimli zeminlerde yük altında çalışan AGV'ler için yararlı olabilir. Bununla birlikte, modern BLDC motor kontrolörleri, bu yüksek başlangıç torku davranışını saha odaklı kontrol stratejileri yoluyla kopyalayabilir ve bu da fırçalı motorun bu alandaki tarihsel avantajını azaltabilir.
AGV Tahrik Tekerlekleri için Planet Dişli Motorları
Motor elemanının fırçalanmış veya fırçasız DC olmasına bakılmaksızın, AGV tahrik tekerlekleri neredeyse evrensel olarak motor ve tekerlek arasında planeter dişli redüksiyonunu kullanır. Planet dişli konfigürasyonu, çeşitli nedenlerden dolayı AGV uygulamaları için tercih edilen dişli kutusu tipidir:
Planet dişliler en yüksek tork yoğunluğunu (belirli bir dişli kutusu dış çapı için en yüksek çıkış torkunu) sağlar; bu, motor-şanzıman-tekerlek ünitesinin tamamının araç şasisindeki sıkı boyut kısıtlamalarına uyması gereken AGV tekerlek tertibatlarında kritik öneme sahiptir. Planet dişli kutusunun koaksiyel giriş/çıkış hizalaması, kompakt bir hat içi montaja izin verir: motor → planeter dişli kutusu → tahrik tekerleği, hepsi tek bir eksen üzerinde, bir düz dişli veya sonsuz dişli redüksiyonu tarafından oluşturulan ofset olmadan.
Planet dişli kutuları ayrıca sonsuz dişli alternatifleriyle karşılaştırıldığında (orana ve ilerleme açısına bağlı olarak tipik olarak %50-85) yüksek verimlilik sağlar (kademe başına %92-97), bu da akü verimliliği açısından kritik AGV uygulamasında önemlidir. %70 dişli kutusu verimliliğiyle çalışan bir sonsuz dişli AGV tahrik motoru, motorun elektrik enerjisi girişinin %30'unu yalnızca dişli kutusunda ısınmak için kaybeder; bu, pille çalışan bir araç için kabul edilemez bir cezadır.
AGV Tahrik Motoru Seçimi için Temel Spesifikasyon Parametreleri
| Parametre | Tipik AGV Spesifikasyon Aralığı | Neden Önemlidir? |
|---|---|---|
| Nominal gerilim | 24V / 36V / 48VDC | AGV akü paketi voltajıyla eşleşmelidir; daha yüksek voltaj, daha düşük akımda daha yüksek güce izin vererek kablo kayıplarını ve motor sıcaklığını azaltır |
| Nominal güç | Tahrik motoru başına 50W – 1.000W (araca ve faydalı yüke bağlı olarak) | Yüklü aracı çalışma ortamındaki en dik yokuşta hızlandırmaya yeterli olmalıdır; Yetersiz güç, yokuşlarda motorun termal aşırı yüklenmesine neden olur |
| Tekerlekteki çıkış hızı | 50–300 RPM (tekerlek mili, vites küçültmeden sonra) | Aracın seyahat hızını belirler; tekerlek çapı ve hedef AGV hızı, gerekli çıkış mili devrini ve dolayısıyla gerekli dişli oranını tanımlar |
| Sürekli çıkış torku | Tahrik motoru başına 5–200 Nm (yüke ve eğime bağlı olarak) | Tam yüklü AGV'yi nominal hızda maksimum eğimde hareket ettirmek için gereken torku aşmalıdır; Şok yük marjı için 2 kat güvenlik faktörü uygulayın |
| Tepe torku | 2×–3× sürekli tork | Tam yük altında durmadan hızlanma için gereklidir; motor ve kontrol cihazı, aşırı ısınmadan veya aşırı akım korumasını tetiklemeden hızlanma rampası süresince tepe torkunu korumalıdır |
| Kodlayıcı çözünürlüğü | 100–4096 PPR (motor milinde devir başına darbe) | Ölü hesaplama navigasyonu için kilometre sayacı doğruluğunu belirler; Daha yüksek kodlayıcı çözünürlüğü, navigasyon sensörlerinden gelen mutlak konum düzeltmeleri arasındaki konum tahminini iyileştirir |
| Verimlilik | Nominal çalışma noktasında genel olarak ≥ %85 (motor dişli kutusu) | Pilin çalışma süresini doğrudan belirler; BLDC planetary %90 birleşik verimliliğe ulaşır; bunu fırçalanmış sonsuz dişliye tercih edin (%60-70 birleşik) |
| IP derecesi | Genel iç mekan lojistiği için minimum IP54; Islak veya tozlu ortamlar için IP65 | AGV motorları zemin seviyesindeki kirletici maddelere maruz kalır; Yetersiz giriş koruması, toz ve nem nedeniyle zamanından önce yatak ve sarım arızalarına yol açar |
| Görev döngüsü | 7/24 operasyonlar için sürekli S1; Tek vardiya için S3 aralıklı | Motorun termal değeri çalışma düzenine uygun olmalıdır; S3 aralıklı çalışma için derecelendirilmiş bir motor, sürekli S1 AGV uygulamalarında aşırı ısınacaktır |
Gerekli AGV Tahrik Motoru Torku Nasıl Hesaplanır?
Bir AGV'yi düz bir yüzeyde sabit hızda sürmek için gereken torkun yuvarlanma direncini aşması gerekir; eğimde yerçekimi bir eğim direnci bileşeni ekler. Tipik iki çekişli AGV'nin hesaplaması:
Toplam araç ağırlığı: W = (AGV dara ağırlığı maksimum taşıma kapasitesi) × g [Newton]
Yuvarlanma direnci kuvveti: F_rolling = W × μ_r, burada μ_r yuvarlanma direnci katsayısıdır (pürüzsüz beton üzerindeki lastik tekerlekler için genellikle 0,01–0,02; yumuşak zeminler veya pürüzlü yüzeyler için 0,02–0,05)
Derece direnç kuvveti (eğimler için): F_derece = W × sin(θ), burada θ eğim açısıdır (%5 eğim için, θ ≈ 2,86°, sin(θ) ≈ 0,05)
Toplam tahrik gücü: F_total = F_rolling F_grade
Tahrik tekerleğinde gerekli tork (motor başına, iki tahrik motoru olduğu varsayılarak): T_wheel = (F_total / 2) × r_wheel, burada r_wheel, metre cinsinden tahrik tekerleği yarıçapıdır
Gerekli motor torku: T_motor = T_wheel / (i × η), burada i dişli azaltma oranıdır ve η dişli kutusu verimliliğidir
Örneğin, toplam yüklü ağırlığı 500 kg, 150 mm çaplı tahrik tekerlekleri, %3 eğimli, 0,95 verimlilikte 25:1 planet dişli kutusu olan bir AGV:
- G = 500 × 9,81 = 4.905 K
- F_rolling = 4,905 × 0,015 = 73,6 N
- F_derecesi = 4.905 × 0,03 = 147,2 N
- F_toplam = 220,8 N; motor başına = 110,4 N
- T_tekerlek = 110,4 × 0,075 = 8,28 Nm
- T_motor = 8,28 / (25 × 0,95) = 0,35 Nm nominal sürekli tork
Hızlanma torku için 2 kat güvenlik faktörü ekleyin: tepe motor torku gereksinimi ≈ 0,70 Nm. 48V'de ≥ 0,70 Nm tepe torkuna ve 25:1 oranına sahip bir BLDC planet dişli motoru bu gereksinimi karşılar. Sürekli tork değeri, yeterli termal marj ile sürekli gerekli torka (eğimdeki tam yükte 0,35 Nm) karşı doğrulanmalıdır.
Sıkça Sorulan Sorular
Bir AGV'nin direksiyon konfigürasyonu motor seçimini nasıl etkiler?
AGV'ler, her biri farklı motor gereksinimlerine sahip çeşitli direksiyon konfigürasyonları kullanır. Diferansiyel tahrik (iki bağımsız tahrik tekerleği, direksiyon simidi yok), iki tahrik motorunu farklı hızlarda çalıştırarak dönüşler oluşturur; bu, her iki motorun da hız-tork özellikleri açısından yakından eşleşmesini ve her iki tekerlekte diferansiyel hızı aynı anda yönetebilen koordineli bir motor sürücüsü tarafından kontrol edilmesini gerektirir. Üç tekerlekli bisikletin direksiyonu (önde yönlendirilen bir tahrik tekerleği, iki pasif arka tekerlek) ayrı bir direksiyon aktüatörüne sahip tek bir tahrik motoru kullanır; motor seçimi basittir ancak direksiyon aktüatörünün entegrasyonu dikkate alınmalıdır. Çok yönlü sürücüler (her köşede mekanik veya çok yönlü tekerlekler) ayrı ayrı kontrol edilen dört motor kullanır ve yanal ve çapraz harekete izin verir; motor kontrolörleri dört kanallı koordinasyonu sağlamalıdır ve motorlar, çalışma aralıkları boyunca mükemmel hız eşleştirme özelliklerine sahip olmalıdır.
AGV tahrik motorları için hangi enkoder tipi önerilir?
Artımlı kodlayıcılar (dörtlü A/B çıkışı), AGV tahrik motoru kilometre ölçümü için en yaygın tiptir; navigasyon kontrol cihazının kat edilen tekerlek mesafesine ve hıza dönüştürdüğü devir başına darbe sayısını sağlarlar. Mutlak kodlayıcılar, güç açıldıktan sonra kontrol cihazının hedef arama olmadan konumu bilmesini gerektiren uygulamalarda ara sıra kullanılır, ancak odometri (mesafe ölçümü) için artımlı kodlayıcılar standarttır. Motor şaftındaki 500-1000 PPR'lik çözünürlük, standart planeter dişli redüksiyon oranlarıyla iyi bir kilometre ölçümü doğruluğu için genellikle yeterlidir. Daha yüksek çözünürlük (2000–4096 PPR), tekerlek milinin motor devri başına bir devrin daha büyük bir kısmını hareket ettirdiği düşük oranlı sistemlerde odometriyi iyileştirir.
AGV tahrik motorları rejeneratif frenlemeyle kullanılabilir mi?
Evet — AGV uygulamalarındaki BLDC motor kontrolörleri tipik olarak rejeneratif frenlemeyi destekler; burada motor yavaşlama sırasında bir jeneratör görevi görür ve kinetik enerjiyi tekrar elektrik enerjisine dönüştürerek aküyü yeniden şarj eder. Rejeneratif frenleme, akü tüketimini azaltır (özellikle sık yavaşlama olaylarının olduğu dur-kalk AGV rotalarında), fren aşınmasını azaltır ve mekanik fren ısınması olmadan daha hızlı yavaşlamaya olanak tanır. Tipik bir AGV uygulamasında rejeneratif frenlemenin enerji geri kazanım verimliliği, hızlanma için kullanılan enerjinin %15-30'u kadardır; bu, yüksek frekanslı kısa rota operasyonları için anlamlıdır. Rejeneratif özellik, motor kontrol cihazının çift yönlü akım akışını desteklemesini ve akü yönetim sisteminin aşırı gerilim korumasına girmeden yenilenen şarj akımını kabul etmesini gerektirir.
AGV Tahrik Motorları Zhejiang Saiya Akıllı Üretim'den
Zhejiang Saiya Akıllı Üretim Co, Ltd , Deqing, Zhejiang, otonom yönlendirmeli araç uygulamaları için BLDC planet dişli motorlar, fırçalanmış DC planet dişli motorlar ve komple AGV tahrik motoru düzenekleri üretmektedir. AGV ürün yelpazesi, 24V, 36V ve 48V nominal akü gerilimlerinde entegre enkoderlere sahip, 32 mm ila 82 mm çapındaki kasa boyutlarında, 5:1'den 500:1'e kadar planeter dişli redüksiyon oranlarına sahip, hafif hizmet tipi küçük parça taşıma AGV'lerinden ağır hizmet tipi malzeme taşıma platformlarına kadar taşıma yükü sınıflarını kapsayan tahrik motor ünitelerini kapsar. Özel AGV motor spesifikasyonları (voltaj, oran, enkoder çözünürlüğü, montaj, IP derecesi ve konnektör) şirketin OEM/ODM geliştirme hizmeti aracılığıyla edinilebilir.
Tahrik motoru önerisi ve teklifi almak için AGV spesifikasyonlarınızla (araç ağırlığı, taşıma kapasitesi, maksimum hız, akü voltajı, tekerlek çapı ve çalışma ortamı) bizimle iletişime geçin.
İlgili Ürünler: AGV Proje Ürünleri | Fırçasız DC Dişli Motorları | Planet Dişli Motorları | Hassas Planet Şanzıman | Fırçalı DC Dişli Motorları
İlgili Ürünler
-

Bu 6W indüksiyon AC dişli motoru, çok çeşitli endüstriyel ve ev uygulamaları için uygun verimli, kompakt ve güvenilir küçük bir motordur. Tek fazlı 110V ile üç fazlı 220V arasında değişen voltajlar...
Detaylara bakın -

6W Fırça DC GBear motoru, çeşitli uygulamalar için uygun, verimlilik ve çok yönlülük için tasarlanmıştır. 60mm x 60mm kompakt bir çerçeve boyutu ile, sıkı boşluklara sorunsuz bir şekilde sığar. Mot...
Detaylara bakın -

10W Fırça DC dişli motoru, bir dizi endüstriyel ve hobi uygulaması için yüksek performans ve uyarlanabilirlik sunar. 60mm x 60mm çerçeve boyutu ile bu motor, güçten ödün vermeden kapalı alanlara sı...
Detaylara bakın -

24V fırçasız dişli motoru, çeşitli uygulama için tasarlanmış çok yönlü ve verimli bir motordur. 60mm x 60mm ila 104mm x 104mm arasında değişen boyutlarla, bu motor çeşitli ekipman boyutlarına sığab...
Detaylara bakın -

32 mm fırçalanmış gezegen dişli motoru, yüksek tork ve hassas kontrol gerektiren çeşitli uygulamalar için tasarlanmış kompakt ve verimli bir çözümdür. 32 mm çapında, bu motor, alanın premium olduğu...
Detaylara bakın -

42mm fırça gezegen dişli motoru, hassas tork ve hız kontrolü gerektiren çeşitli uygulamalarda yaygın olarak kullanılan çok yönlü ve verimli bir bileşendir. 0.7 ila 1.1A arasında değişen nominal bir...
Detaylara bakın -

32mm fırçasız gezegen dişli motoru, verimlilik ve güvenilirlik gerektiren uygulamalar için ideal olan yüksek performanslı, kompakt bir çözümdür. 24V nominal voltajda çalışan ve 20W güç tüketen bu m...
Detaylara bakın -

42mm fırçasız gezegen motoru, hassas iletim gerektiren çeşitli senaryolarda yaygın olarak kullanılan yüksek verimli bir motor ürünüdür. Bu motorun nominal akımı 1.3A ve nominal tork 0.048n.m'd...
Detaylara bakın -

40, 60, 80, 120 ve 160 modellere sahip Flanş Boyut Aralığı SPE Serisi şanzımanlar, verimli ve sağlam güç iletim çözümleri sağlamak için tasarlanmıştır. Bu dişli kutuları, yuvarlak bir çıkış flanşın...
Detaylara bakın -

SPF serisi, 40mm ila 160 mm arasında boyutları barındıran kare çıkış flanşları ile birlikte. Bu flanşlar, çeşitli endüstriyel uygulamalarda mükemmel olmak üzere tasarlanmıştır ve bir dizi gereksini...
Detaylara bakın -

52mm fırçalanmış gezegen dişli motoru, yüksek tork ve hassas kontrol gerektiren çeşitli uygulamalar için tasarlanmış kompakt ve verimli bir çözümdür. 52 mm çapında, bu motor, alanın premium olduğu ...
Detaylara bakın -

62mm fırça gezegen dişli motoru, hassas tork ve hız kontrolü gerektiren çeşitli uygulamalarda yaygın olarak kullanılan çok yönlü ve verimli bir bileşendir. 2,5 ila 5.5A arasında değişen nominal bir...
Detaylara bakın
İletişim bilgileri
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Ofis: Hangzhou Saiya Transicisson Equipment Co., Ltd
- Office Address: Oda 2201, Wanyin Binası, Hangzhou City, Zhejiang Eyaleti
- Fabrika: Zhejiang Saiya Akıllı Üretim A.Ş., Ltd.
- Factory Address: No.35 Bina, Zhongnan Yüksek teknoloji Yunhe Zhigu Endüstri Parkı, Xinan Kasabası, Deqing County, Huzhou City, Zhejiang, Çin
Hızlı bağlantı
ÜRÜN
Eğer ilgileniyorsanız
Ürünlerimizde,
Lütfen bize danışın
Copyright © Zhejiang Saiya Akıllı Üretim A.Ş., Ltd. All Rights Reserved.
Özel Dişli Azaltma Motorları Tedarikçiler
